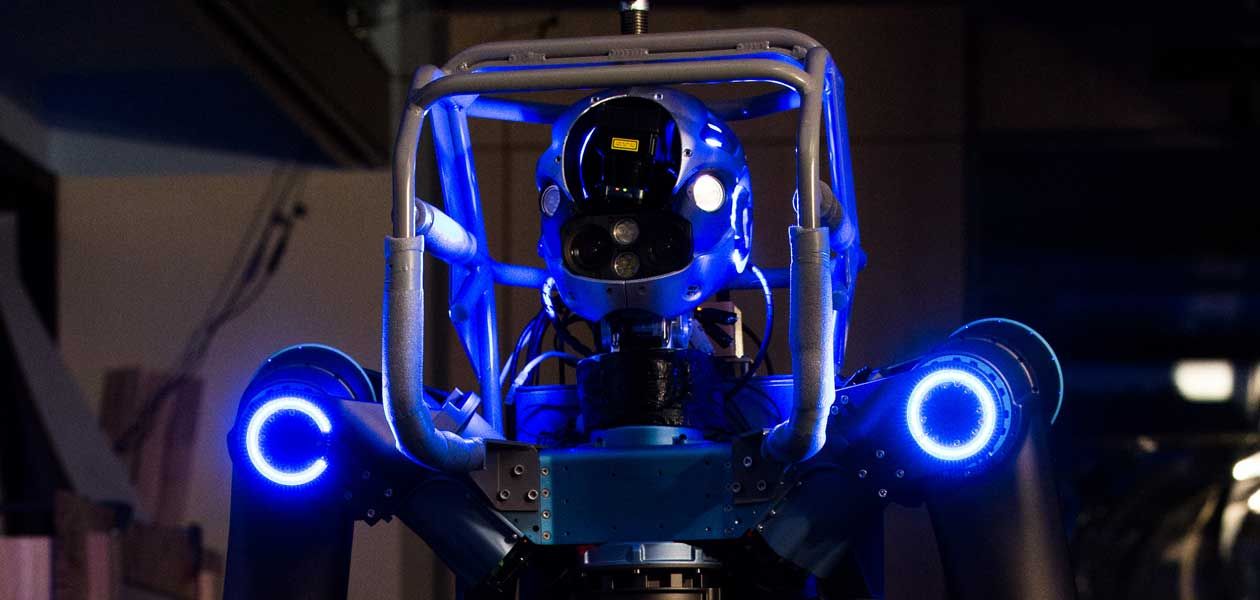
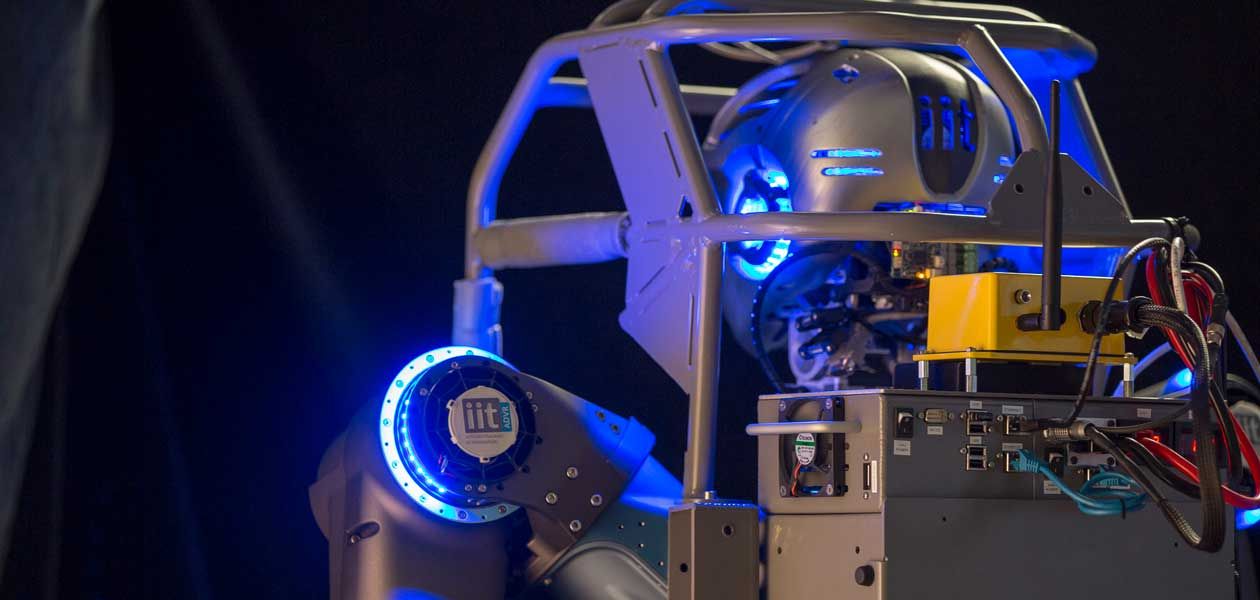
The WALK-MAN project aims to develop a humanoid robot that can operate in buildings that were damaged following natural and man-made disasters. The robot will demonstrate new skills:
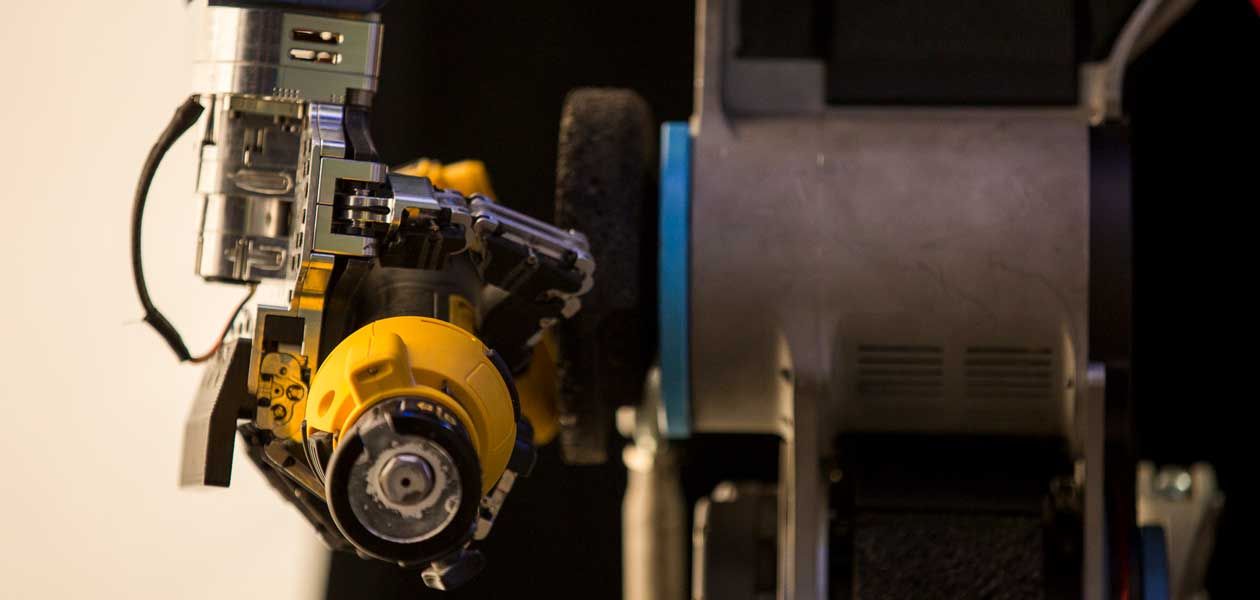
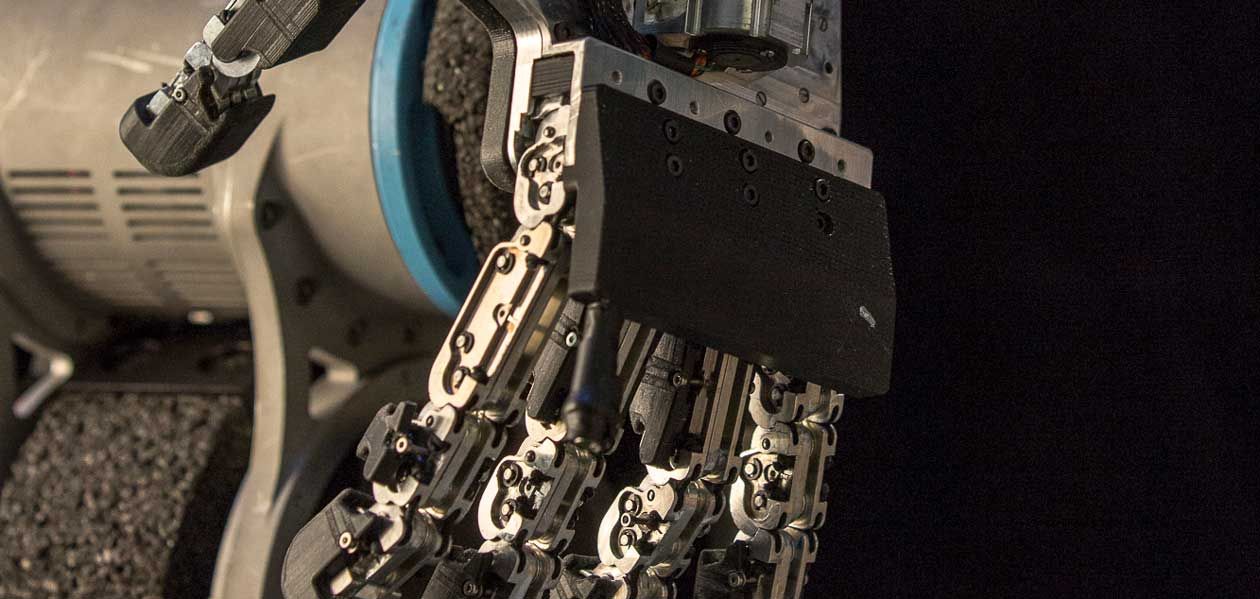
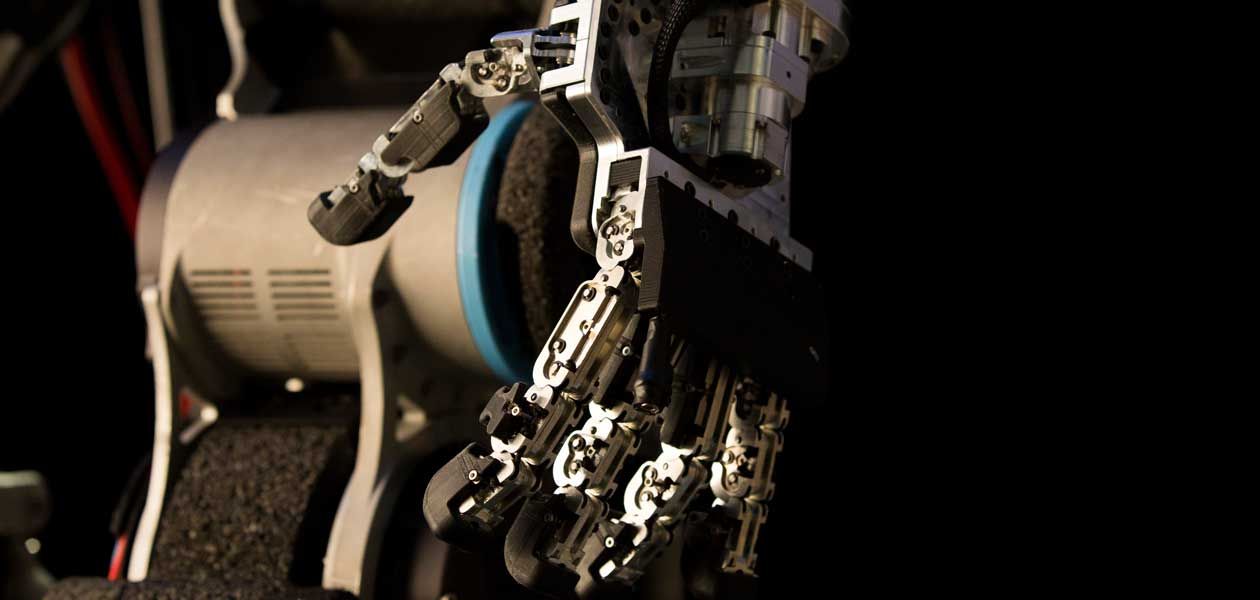
- dextrous, powerful manipulation skills - e.g. turning a heavy valve of lifting collapsed masonry,
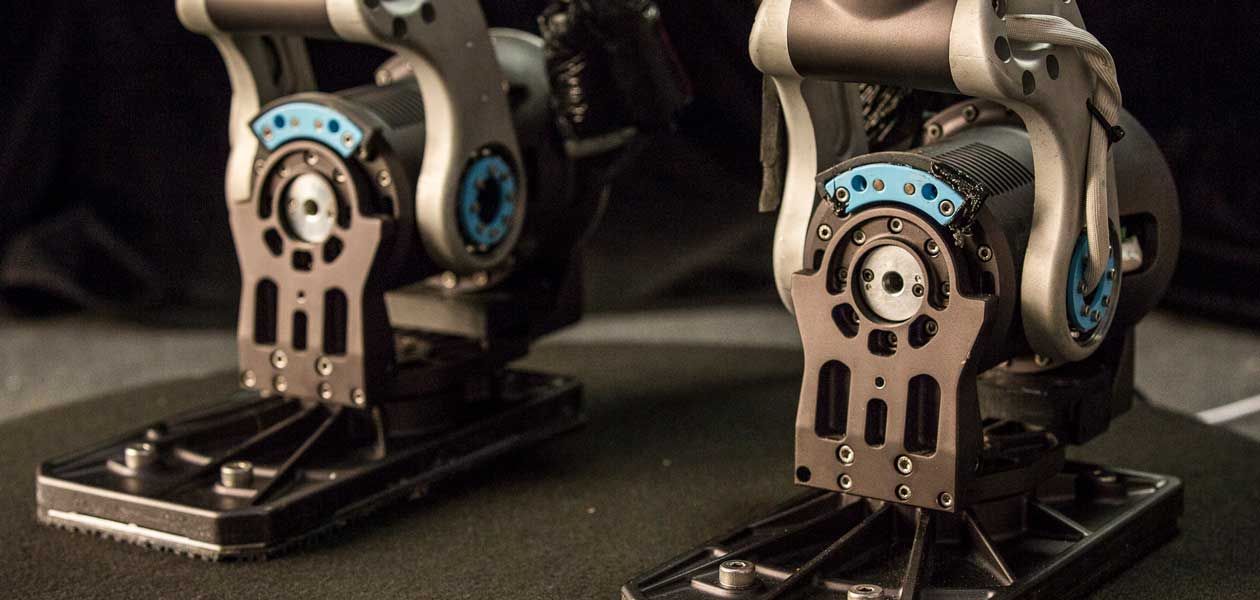
- robust balanced locomotion - walking, crawling over a debris pile, and
- physical sturdiness - e.g. operating conventional hand tools such as pneumatic drills or cutters.
In addition, the robot will have the sufficient cognitive ability to allow it to operate autonomously or under tele-operation in case of severe communication limitations for remote control due to limited channel bandwidth and/or reliability).
The robot will show human levels of locomotion, balance and manipulation and operate outside the laboratory environment. Disaster sites may include buildings such as factories, offices, houses.